荷役クレーンの揺れを制御 実証実験に成功

豊橋技科大・寺嶋学長の理論応用
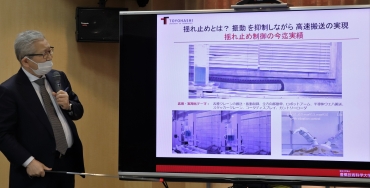
豊橋技術科学大学の寺嶋一彦学長と、船用機器メーカー「相浦機械」(長崎県佐世保市)などの研究グループは26日、共同開発した木材チップ運搬船の荷役クレーンの自動運転装置によって、作業時の揺れを抑える実証試験に成功したと発表した。長時間作業の解消と操作の安定性が期待できる。1年後の実用化を目指す。
製紙材料となる木材チップの荷役作業は、アーム状の専用クレーンで「ホールド」(貨物倉)にある木片を「ホッパー」(貯留槽)へ移し替えてからコンベアで地上へ運ぶ。クレーンのワイヤロープにぶら下げた「グラブ」で木片をつかみ、巻き上げてホッパーへ移し替える。
自動運転装置は木片の表面を検知する三つのセンサーを「グラブ」に取り付けた。木片をつかんだり、アームの操作でホッパーへ投入したりする作業を自動化できる。
センサーで検知した荷物の情報をクレーンに組み込んだ自動運転プログラムへ送る。
プログラムは寺嶋学長が考案した揺れを防ぐ制御理論から導いた数式モデルを応用。作業手順やクレーンの大きさ、ロープの長さなどのデータを元に加速度を加減して揺れを抑える。
自動化へ向けた研究開発は2018年から取り組んできた。今年8月の実証実験で制御なしの状態と比べ、同じ作業速度でも振れ幅が5分の1に抑えられた。これら技術は特許申請済み。
クレーンでの投入は通常72時間連続になり、運転手は交代で一連の作業を3000回も繰り返す過酷な労働環境だ。操作の熟練度で安全性は一定しないことも担い手の確保へ課題だった。
完全自動化ではないため運転手の監視サポートは必要だが、操作の手間は省ける。作業中止になるような強風でなければ影響はないという。
今後「シンフォニアテクノロジー」を通じて精度と汎用性を高め、商品化を目指す。
【加藤広宣】
豊橋技科大・寺嶋学長の理論応用
豊橋技術科学大学の寺嶋一彦学長と、船用機器メーカー「相浦機械」(長崎県佐世保市)などの研究グループは26日、共同開発した木材チップ運搬船の荷役クレーンの自動運転装置によって、作業時の揺れを抑える実証試験に成功したと発表した。長時間作業の解消と操作の安定性が期待できる。1年後の実用化を目指す。
製紙材料となる木材チップの荷役作業は、アーム状の専用クレーンで「ホールド」(貨物倉)にある木片を「ホッパー」(貯留槽)へ移し替えてからコンベアで地上へ運ぶ。クレーンのワイヤロープにぶら下げた「グラブ」で木片をつかみ、巻き上げてホッパーへ移し替える。
自動運転装置は木片の表面を検知する三つのセンサーを「グラブ」に取り付けた。木片をつかんだり、アームの操作でホッパーへ投入したりする作業を自動化できる。
センサーで検知した荷物の情報をクレーンに組み込んだ自動運転プログラムへ送る。
プログラムは寺嶋学長が考案した揺れを防ぐ制御理論から導いた数式モデルを応用。作業手順やクレーンの大きさ、ロープの長さなどのデータを元に加速度を加減して揺れを抑える。
自動化へ向けた研究開発は2018年から取り組んできた。今年8月の実証実験で制御なしの状態と比べ、同じ作業速度でも振れ幅が5分の1に抑えられた。これら技術は特許申請済み。
クレーンでの投入は通常72時間連続になり、運転手は交代で一連の作業を3000回も繰り返す過酷な労働環境だ。操作の熟練度で安全性は一定しないことも担い手の確保へ課題だった。
完全自動化ではないため運転手の監視サポートは必要だが、操作の手間は省ける。作業中止になるような強風でなければ影響はないという。
今後「シンフォニアテクノロジー」を通じて精度と汎用性を高め、商品化を目指す。
【加藤広宣】